01
Align · OpenCV · no AI
Make the pixels match the template.
User photos are hand-held — tilted, zoomed, slightly rotated. Before anything else, SIFT feature-matches both frames against the reference and warps them into template space. Below: the raw phone photo (left) and the reference template (right), with green lines connecting the keypoints that survived Lowe’s ratio test and RANSAC.
Produces
Two rectified images, pixel-aligned with the template.
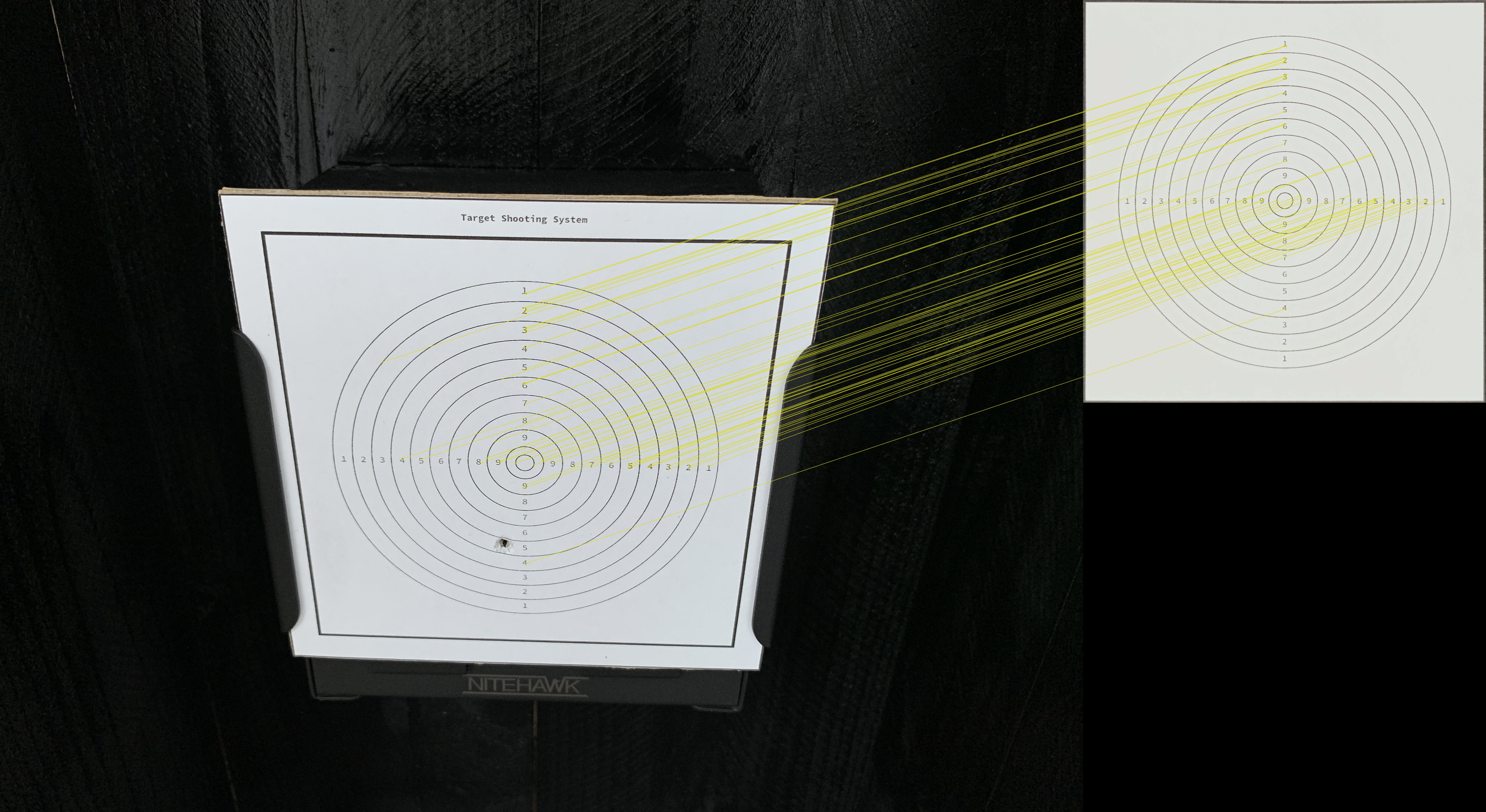
sift keypoints · flann matcher · lowe 0.7 · ransac homography